Navigeren als een bij; met slechts 42 kilobyte geheugen vindt deze drone de weg naar huis (video)
Het klinkt als sciencefiction, maar het is dichterbij dan ooit: drones die door kassen vliegen om tomaten te inspecteren, pakketten bezorgen of industrieterreinen controleren. Nu de aandacht voor dronenzwermen snel toeneemt, lijken ook de ontwikkelingen in de dronewereld in een stroomversnelling te raken. Toch kampen drones nog altijd met een belangrijk probleem: navigatie vraagt veel rekenkracht en geheugen. Dat maakt ze zwaar, duur en energie-intensief. Wetenschappers onder leiding van de TU Delft hebben daarom inspiratie gehaald uit de natuur. Door te onderzoeken hoe honingbijen navigeren, vonden zij mogelijk een oplossing voor dit hardnekkige probleem.
Het wetenschappelijke team, bestaande uit robotici van de TU Delft en biologen van de Universiteit van Wageningen en de Carl von Ossietzky Universiteit in Oldenburg, presenteert nu „Bee-Nav“: een navigatiestrategie voor robots en drones die is geïnspireerd op honingbijen. Hierdoor kunnen zelfs zeer kleine robots ver van huis reizen en veilig terugkeren, met behulp van een neuraal geheugen van slechts 42 kilobyte. In een nieuwe omgeving voert de drone eerst een korte leervlucht uit in de buurt van huis, net zoals honingbijen dat doen. Daarna kan het honderden meters verder vliegen en toch de weg terug vinden. Bee-Nav stelt lichte, veilige robots in staat om zelfstandig te navigeren, wat de deur opent naar toepassingen zoals vlinderachtige drones die kassen in de gaten houden. Het onderzoek biedt ook nieuw inzicht in hoe vliegende insecten de weg naar huis vinden.
Uitdagingen bij navigeren
Veel toekomstige robots zullen zelfstandig moeten navigeren, zelfs op plekken waar geen gps beschikbaar is. De meeste huidige systemen doen dit door gedetailleerde kaarten van de omgeving te maken. Maar daarvoor is veel rekenkracht en geheugen nodig, waardoor dergelijke systemen duur en energieverslindend zijn.
Honingbijen laten zien dat er wellicht een veel efficiëntere oplossing bestaat. Ondanks hun kleine hersenen kunnen ze lange afstanden afleggen en toch weer thuiskomen. Dit doen ze deels door middel van odometrie: ze schatten aan de hand van visuele bewegingssignalen in hoe ver en in welke richting ze zich hebben verplaatst. Je zou het een beetje kunnen vergelijken met stappen tellen.
Helaas vertoont odometrie na verloop van tijd afwijkingen, waardoor de nauwkeurigheid steeds verder afneemt. Daarom vertrouwen insecten ook op hun visuele geheugen. Ze onthouden hoe de omgeving eruitziet rond belangrijke plekken, zoals hun thuis. Wetenschappers hebben een goed inzicht in de odometrie van insecten, zelfs tot op zenuwniveau, maar het visuele geheugen is nog steeds veel moeilijker te verklaren. Ook was het nog niet duidelijk hoe deze twee kunnen worden gecombineerd om zeer kleine robots te helpen autonoom te navigeren.
Het onderzoeksteam uit Nederland en Duitsland liet zich inspireren door het gedrag van honingbijen wanneer ze voor het eerst de bijenkorf verlaten. Deze kleine beestjes beginnen met korte leervluchten in de buurt van hun bijenkorf. Daarna kunnen ze veel verder weg vliegen en toch weer succesvol terugkeren. Het is een beetje alsof je je eigen huis uitstapt en door de eerste paar straten in de buurt loopt. Je herkent je buurt nu vanuit alle hoeken, hoe je die op de terugweg ook benadert.
“We waren gefascineerd door het feit dat honingbijen ver van huis kunnen vliegen via kronkelende routes, maar toch bijna rechtstreeks terugkeren,” zegt Guido de Croon, hoogleraar bio-geïnspireerde AI voor drones aan de TU Delft. “Biologen hebben aangetoond dat bijen voor de terugweg vertrouwen op odometrie en meer gebruikmaken van hun visuele geheugen naarmate ze dichter bij huis komen. Maar wat en hoe ze precies leren voor hun visuele geheugen, is nog niet volledig begrepen. Dat was de kloof die we moesten overbruggen om een praktische navigatiestrategie te ontwikkelen voor praktische navigatie strategieën voor robots en drones.
Robotexperiment in de Cyberzoo van de TU Delft. Na een leervlucht kan de robot vanuit verschillende punten binnen het aangeleerde gebied terugkeren naar de startlocatie. De robot hoeft de startlocatie niet te zien, aangezien het leerproces is gebaseerd op odometrie.
In Bee-Nav maakt de robot ook eerst een korte leervlucht in de buurt van zijn thuisbasis. Tijdens die vlucht legt hij panoramische beelden van de omgeving vast. Een klein neuraal netwerk leert vervolgens die beelden te verwerken om de richting en afstand naar huis te schatten.
“Net als een insect weet de robot misschien niet altijd precies waar zijn thuis is”, zegt Dequan Ou, promovendus aan de Technische Universiteit Delft en eerste auteur van het artikel. “Zijn thuis kan te klein zijn om te zien, of verborgen liggen achter bomen. Daarom hebben we het neurale netwerk getraind met behulp van odometrische schattingen van de richting en afstand naar huis, ook al worden die na verloop van tijd minder nauwkeurig. De hamvraag was of dat nog steeds voldoende zou zijn om de robot te leren terug te keren naar huis.”
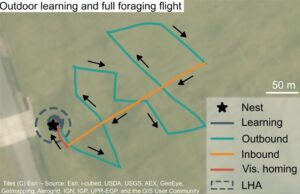
Het vliegroutepatroon van de drone in de buitenlucht voor de volledige Bee-Nav-strategie, met de leervlucht, de heen- en terugvlucht op basis van odometrie, en vervolgens visuele terugkeer naar het aangeleerde gebied.
Dat bleek inderdaad het geval te zijn. De afwijking in de afstandsmeting vormde geen belemmering voor een succesvolle visuele terugkeer naar de startpositie. De afbeelding hierboven toont vier vluchten van de robot, die vanaf verschillende punten binnen het aangeleerde gebied van start gingen. Met behulp van een neuraal netwerk van slechts 3,4 kilobyte interpreteerde de robot panoramische beelden van zijn omgeving en schatte hij in welke richting hij moest bewegen en hoe ver hij nog van de startpositie verwijderd was. Dankzij de geschatte afstand kon de robot sneller bewegen wanneer hij verder weg was en langzamer naarmate hij zijn thuisbasis naderde. Bij alle vluchten keerde de robot succesvol terug naar huis.
Op weg naar praktische toepassingen
Na succesvolle kleine navigatie-experimenten binnenshuis hebben de onderzoekers de volledige navigatiestrategie getest in grotere omgevingen, zowel binnen als buiten. Tijdens een test buiten op het Nederlandse drone-onderzoeksveldlab Unmanned Valley in Valkenburg vloog de drone meer dan 600 meter ver en wist hij toch terug te keren naar zijn startpunt, met behulp van een neuraal netwerk van slechts 42 kilobyte.
In grote binnenruimtes, zoals hangars, presteerde het systeem bij elke test uitstekend. Bij winderige omstandigheden buiten daalde het succespercentage tot 70 procent. Een belangrijke reden hiervoor was dat de wind de drone deed kantelen, waardoor de beelden moeilijker te gebruiken waren voor navigatie.
Het vliegroutepatroon van de drone in de buitenlucht voor de volledige Bee-Nav-strategie, met de leervlucht, de heen- en terugvlucht op basis van odometrie, en vervolgens visuele terugkeer naar het aangeleerde gebied.
“De experimenten zijn zeer bemoedigend”, zegt Dequan Ou. “Maar ze laten ook zien dat ons huidige systeem robuuster moet worden in praktijkomstandigheden.”
Artikel delen
Meer nieuws over Onderzoek - ontwikkeling en innovatie
We gebruiken cookies om ervoor te zorgen dat onze site zo soepel mogelijk draait. Als je doorgaat met het gebruiken van deze site, gaan we ervan uit dat je ermee instemt.