Een onderzoeksteam van AMOLF heeft een zachte robot ontwikkeld die loopt, huppelt en zwemt – allemaal zonder brein, elektronica of AI. Alleen zachte buizen, lucht en een beetje slimme fysica. Mogelijke toekomstige toepassingen variëren van slimme pillen tot ruimtetechnologie.
De studie die deze week in Science werd gepubliceerd, beschrijft een van de snelste zachte robots tot nu toe, en een van de eenvoudigste. De robot heeft geen computer, geen software en geen sensoren. En toch beweegt hij met verrassende coördinatie en autonomie, simpelweg dankzij zijn lichaam en de manier waarop hij met de wereld interageert.
Dus, wat drijft hem dan aan? Onder de beweging schuilt een principe dat je waarschijnlijk al eens bent tegengekomen, maar misschien over het hoofd hebt gezien. Denk aan die wiebelige, opblaasbare buisdansers die ronddansen voor tankstations. Dezelfde fysica die ze laat bewegen, zou wel eens de sleutel kunnen zijn tot de volgende generatie autonome robots.
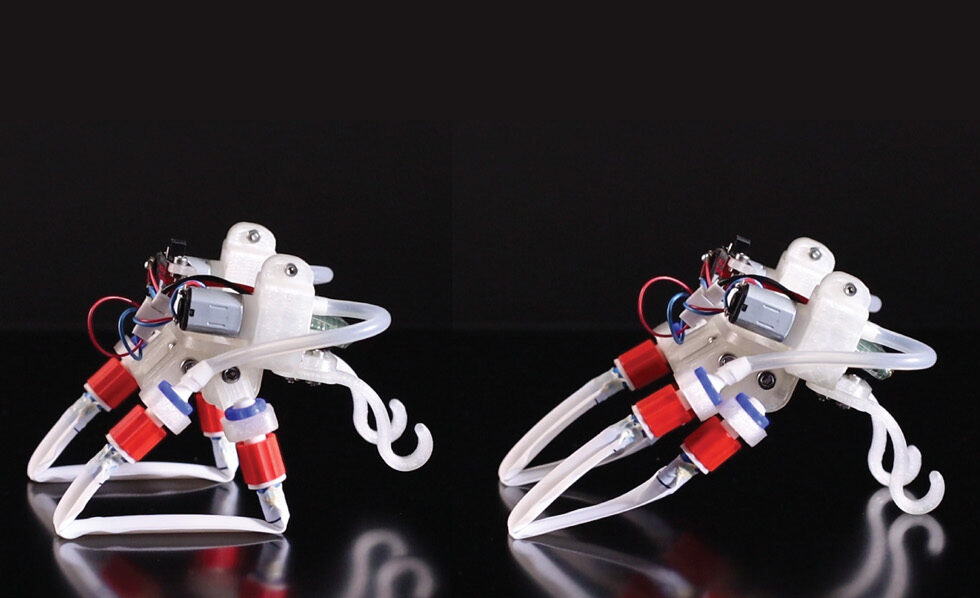
Aangedreven door een continue luchtstroom, beginnen de zachte, buisvormige benen van de robot te oscilleren – net als die buisdansers. Elk been zwaait op zichzelf willekeurig rond. Maar wanneer er meerdere aan elkaar gekoppeld worden, gebeurt er iets onverwachts: hun bewegingen synchroniseren snel en vervallen in ritmische looppatronen.
V.l.n.r: Alberto Comoretto, Mannus Schomaker, Bas Overvelde.
“Plotseling ontstaat er orde uit de chaos”, zegt eerste auteur Alberto Comoretto. “Er is geen code, geen instructies. De benen synchroniseren spontaan en de robot begint te bewegen.” Net als vuurvliegjes die synchroon flitsen of hartcellen die in koor pulseren, ontstaan complexe collectieve bewegingen uit simpele interacties.
En de robot is snel. Wanneer een luchtstroom als input wordt gegeven, bereikt de robot 30 lichaamslengtes per seconde. Relatief gezien bereikt een Ferrari “maar” 20 lengtes per seconde. Deze snelheid is vele malen sneller dan die van andere luchtaangedreven robots, die doorgaans een centrale besturing vereisen.
Nog verrassender: de synchronisatie past zich aan. Als de robot een obstakel tegenkomt, heroriënteert hij zich. Wanneer hij van land naar water beweegt, verschuift de loop spontaan van een in-fase huppelpatroon naar een zwemstijl. Deze overgangen gebeuren zonder enige centrale processor of besturingslogica. In plaats daarvan ontstaat de beweging door de nauwe koppeling tussen lichaam en omgeving.
“In de biologie zien we vaak een vergelijkbare gedecentraliseerde intelligentie”, legt co-auteur Mannus Schomaker uit. “Zeesterren coördineren bijvoorbeeld honderden buisvoetjes met behulp van lokale feedback en lichaamsdynamiek, niet met een gecentraliseerd brein.”
Het onderzoek zet de conventionele gedachte dat robots ingewikkelde besturingssystemen nodig hebben om levensecht gedrag te realiseren, op losse schroeven. “Eenvoudige objecten, zoals buizen, kunnen complex en functioneel gedrag vertonen, mits we begrijpen hoe we de onderliggende fysica kunnen benutten”, zegt hoofdonderzoeker Bas Overvelde. Sterker nog, Overvelde noemt het liever helemaal geen robot. “Er is geen brein, geen computer. In wezen is het een machine. Maar als hij goed is ontworpen, kan hij veel robotsystemen overtreffen en zich gedragen als een kunstmatig wezen.”
Mogelijke toekomstige toepassingen variëren van slimme pillen tot ruimtetechnologie. Veilige microrobots zonder micro-elektronica, die kunnen worden ingeslikt en medicijnen kunnen vrijgeven nadat ze autonoom het doelweefsel hebben bereikt. Draagbare robot-exoskeletten die synchroniseren met de loopstappen zonder processors – wat hun energieverbruik vermindert terwijl de menselijke kracht wordt vergroot. Autonome mechanische machines die geschikt zijn voor extreme omgevingen zoals de ruimte, waar traditionele elektronica kan falen. In bredere zin illustreren deze voorbeelden hoe dit onderzoek de weg vrijmaakt voor mechanische systemen die zich gedragen alsof ze een computer hebben, zonder dat ze die daadwerkelijk nodig hebben.
Met dit werk hoopt het team nieuwe manieren van denken over robotontwerp te inspireren: eenvoudigere systemen die adaptiever en robuuster zijn. Niet door middel van berekeningen en AI, maar door middel van fysica.
Artikel delen
Meer nieuws over Onderzoek - ontwikkeling en innovatie
We gebruiken cookies om ervoor te zorgen dat onze site zo soepel mogelijk draait. Als je doorgaat met het gebruiken van deze site, gaan we ervan uit dat je ermee instemt.