Onderzoek - ontwikkeling en innovatie
13 april 2026

Ontwikkeling van een team van drones dat autonoom een paviljoen bouwt
Wetenschappers gaan een team vliegende robots ontwikkelen dat zelfstandig een paviljoen op menselijke schaal kan bouwen. Als projectcoördinator neemt de TU Delft de leiding in de ontwikkeling van zowel de drones zelf als de bijbehorende planning- en regelalgoritmen.
De wetenschappers van de TU Delft hebben voor dit project, samen met internationale partners, een subsidie van vier miljoen euro ontvangen uit de European Innovation Council Pathfinder Challenge. Als projectcoördinator ontvangt de TU Delft twee miljoen euro
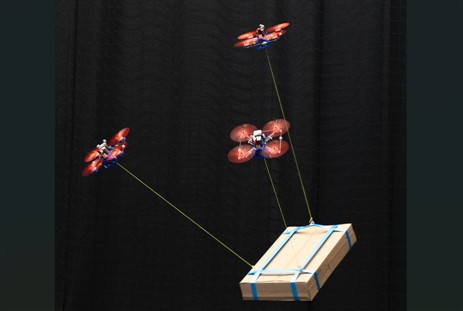
Het nieuwe project bouwt direct voort op eerder onderzoek van Veni onderzoeker Sihao Sun en hoogleraar Javier Alonso-Mora van de afdeling Cognitive Robotics. In dat onderzoek ontwikkelden zij een kabelgedragen systeem waarbij meerdere autonome drones samenwerken om zware en variabele ladingen te vervoeren. Met behulp van kabels werd stabiel en flexibel luchttransport mogelijk.
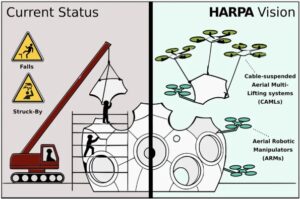
“In dit project, met de naam Heterogeneous Aerial Robot Teams for in situ prefabricated building assembly, willen we een stap verder gaan,” vertelt Sun. “Ons doel is dat drones geprefabriceerde bouwelementen naar een bouwlocatie brengen en deze daar zelfstandig assembleren.” Om dat te bereiken ontwikkelt het team twee verschillende typen vliegende robots.
“De inzet van vliegende robotbouwers is vooral waardevol in moeilijk bereikbare of gevaarlijke omgevingen,” zegt Alonso-Mora. “Denk aan offshore bouwprojecten of constructies op grote hoogte. In zulke situaties kunnen teams van luchtrobots de veiligheidsrisico’s voor mensen sterk verminderen en nieuwe mogelijkheden voor de bouwsector openen.”
Drones die bouten vastdraaien
Het eerste type bestaat uit meerdere drones die gezamenlijk een last vervoeren die aan kabels hangt. Dit systeem kan bouwelementen niet alleen transporteren, maar ook actief van oriëntatie laten veranderen tijdens de vlucht. Dat is essentieel voor een nauwkeurige plaatsing. Het tweede type is een drone die is uitgerust met een robotarm. “Deze drone kan componenten manipuleren en gereedschap gebruiken,” zegt Sun. “Denk bijvoorbeeld aan het verbinden van bouwelementen of het plaatsen en vastdraaien van bouten.”
Een belangrijk deel van het onderzoek richt zich op de ontwikkeling van de hardware voor beide typen drones. Dat betekent onder meer dat de drones groter worden en geschikt moeten zijn voor constructietaken op de juiste schaal. Ook worden robotarmen geïntegreerd die geschikt zijn voor manipulatie in de lucht. Parallel daaraan werken Sun en Alonso-Mora aan algoritmen voor planning en besturing, waarmee een team robots kan worden gecoördineerd, manipulaties tijdens de vlucht kunnen worden aangestuurd en complexe bouwvolgordes kunnen worden uitgevoerd.
Om risico’s te beperken en de ontwikkeling te versnellen, bouwen de onderzoekers een gedetailleerde digitale tweeling van het systeem. In deze virtuele omgeving kunnen waarneming, planning en besturing uitvoerig worden getest voordat de systemen in de praktijk worden ingezet.
Volgens Sun is volledige autonomie een van de grootste uitdagingen van het project. “Besturing met menselijke supervisie is al mogelijk, maar volledig autonoom opereren in beperkte ruimtes vraagt om extreme precisie. Dat vereist waarneming, planning en regeling in real time, met zeer kleine toleranties, terwijl de robots zich in de lucht bevinden.”
Van offshore tot grote hoogte
Elke partner binnen het consortium levert een specifieke expertise. ETH Zürich richt zich op de waarneming door drones, terwijl de Technische Universiteit München verantwoordelijk is voor het ontwerpen van bouwelementen die geschikt zijn voor assemblage door vliegende robots. Het bedrijf FlyingBasket levert zware hijsdrones die lasten tot honderd kilogram kunnen vervoeren, waarmee de schaalbaarheid van het systeem wordt aangetoond. De adviesraad van het consortium bestaat uit Ferrovial, Hilti, Bouygues Construction en EASA.
Meer nieuws over Onderzoek - ontwikkeling en innovatie