
 3 december 2015
3 december 2015
Sturen zonder sturen
Speciale wielen sturen alle kanten op
De uitvinding van het wiel is een belangrijke mijlpaal geweest omdat we daarmee letterlijk vooruit konden komen. Ondanks dat het wiel van toen en het wiel van nu op veel punten grote verschillen vertoont is er ook heel veel gemeenschappelijk. Het belangrijkste daarvan is recht vooruit rijden. Ondertussen zijn er ook wielen waar je mee naast vooruit ook opzij kunt rijden zonder dat de stand van het wiel aangepast moet worden.
Sturen zoals in een auto of een fiets is de gebruikelijke manier om een voertuig een andere richting uit te laten gaan, maar iedereen weet dat dit niet de enige manier is om te sturen. Neem bijvoorbeeld het systeem dat we o.a. bij rupsbanden zien. Daar wordt gestuurd door snelheidsverandering tussen de ‘wielen’ aan de linkerkant en de rechterkant van het voertuig. Er zijn echter ook wielen waarmee je niet alleen vooruit kunt rijden, maar ook opzij. We hebben het dan over wielen die zoals het omni wheel bestaat uit rollen (figuur 1) waardoor er dwars op de rijrichting gereden kan worden.Het Mecanum wiel dat de Zweed Bengt Ilon in 1973 ontwikkelde voor de firma Mecanum AB is nog specialer. Dit wiel is geheel uit rollen opgebouwd die onder een hoek van 45 graden staan ten opzichte van de rijrichting (zie kopfoto). Met dit wiel kan een voertuig letterlijk alle kanten op rijden. Het voertuig zelf hoeft daarbij niet van richting te veranderen.Op YouTube staat een groot aantal filmpjes van voertuigen die dit type wiel gebruiken. Hier kunt u goed zien hoe het werkt en bij de meeste zult u verbaasd zijn van de mogelijkheden.
Sturen door snelheidsverschil
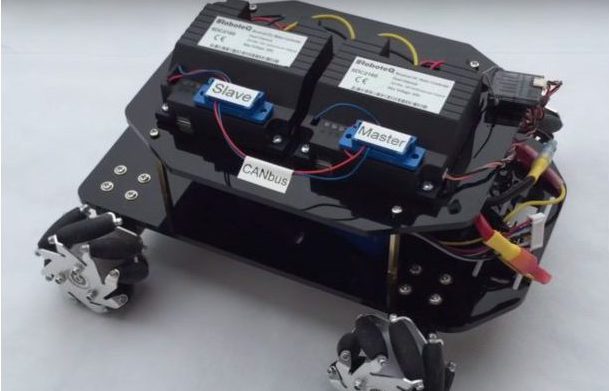
Net als bij de rupsband worden ook bij Mecanum wielen gestuurd door snelheidsverschil tussen de wielen. In figuur 2 kunt u zien hoe de wielen moeten draaien voor een bepaalde beweging. Hieruit blijkt dat voor volledige vrijheid alle vier de wielen onafhankelijk moeten kunnen draaien. Richting en snelheid moeten dus per wiel apart te regelen zijn hetgeen wil zeggen dat voor de sturing vier aparte motordrivers noodzakelijk zijn. De drivers worden bestuurd vanuit één besturingseenheid die bijvoorbeeld de stand van joysticks vertaalt naar de juiste snelheid voor elke motor. Deze controller moet daarbij gebruik maken van de formules die te vinden zijn in figuur 3.
Voor het complete artikel klik hier
Voor de application note van Roboteq klik hier
Voor de gegevens van de SDC2130, een mogelijke regelaar klik hier
Voor meer informatie over het kunnen berekenen van de richting en de daarvoor benodigde motorsnelheden klik hier
Voor één van de vele filmpjes over Mecanum wielen klik hier







