








Vier het 12-jarig jubileum van PCBWay en profiteer van exclusieve aanbiedingen
Vier in juli het 12-jarig jubileum van PCBWay met een evenement dat een hele…

SCHUNK heeft de conceptstudie van zijn 5-vingerhand verder geoptimaliseerd. Bij de nieuwste versie van de antropomorfe grijphand is de elektronica volledig de pols geïntegreerd, waardoor bijzonder compacte oplossingen mogelijk worden.

Via gedefinieerde interfaces kan de grijphand met op de markt verkrijgbare lichtgewicht armen verbonden worden. Voor gebruik in mobiele toepassingen wordt voor de stroomvoorziening een 24 VDC-batterij gebruikt. In de eerste versie kan de hand aangestuurd worden via een seriële bus. De grijphand is er zowel in een linkse als rechtse uitvoering. In grootte, vorm en behendigheid lijkt de hand sterk op zijn menselijke voorbeeld. Met behulp van totaal van negen aandrijvingen kunnen de vijf vingers verschillende grijp-operaties uitvoeren. Bovendien kan hij talrijke gebaren nabootsen, waardoor de visuele communicatie tussen mensen en servicerobots bevorderd wordt en de acceptatie voor gebruik temidden van mensen kan worden verhoogd. Het gebruik van tastsensoren in de vingers zal de grijphand in de toekomst de nodige fijngevoeligheid geven, om ook in ongestructureerde en onvoorspelbare omgevingen grijp- en manipulatieopdrachten uit te kunnen voeren. Elastische grijpvlakken zorgen voor een betrouwbare greep van de gegrepen objecten.


Vier in juli het 12-jarig jubileum van PCBWay met een evenement dat een hele…
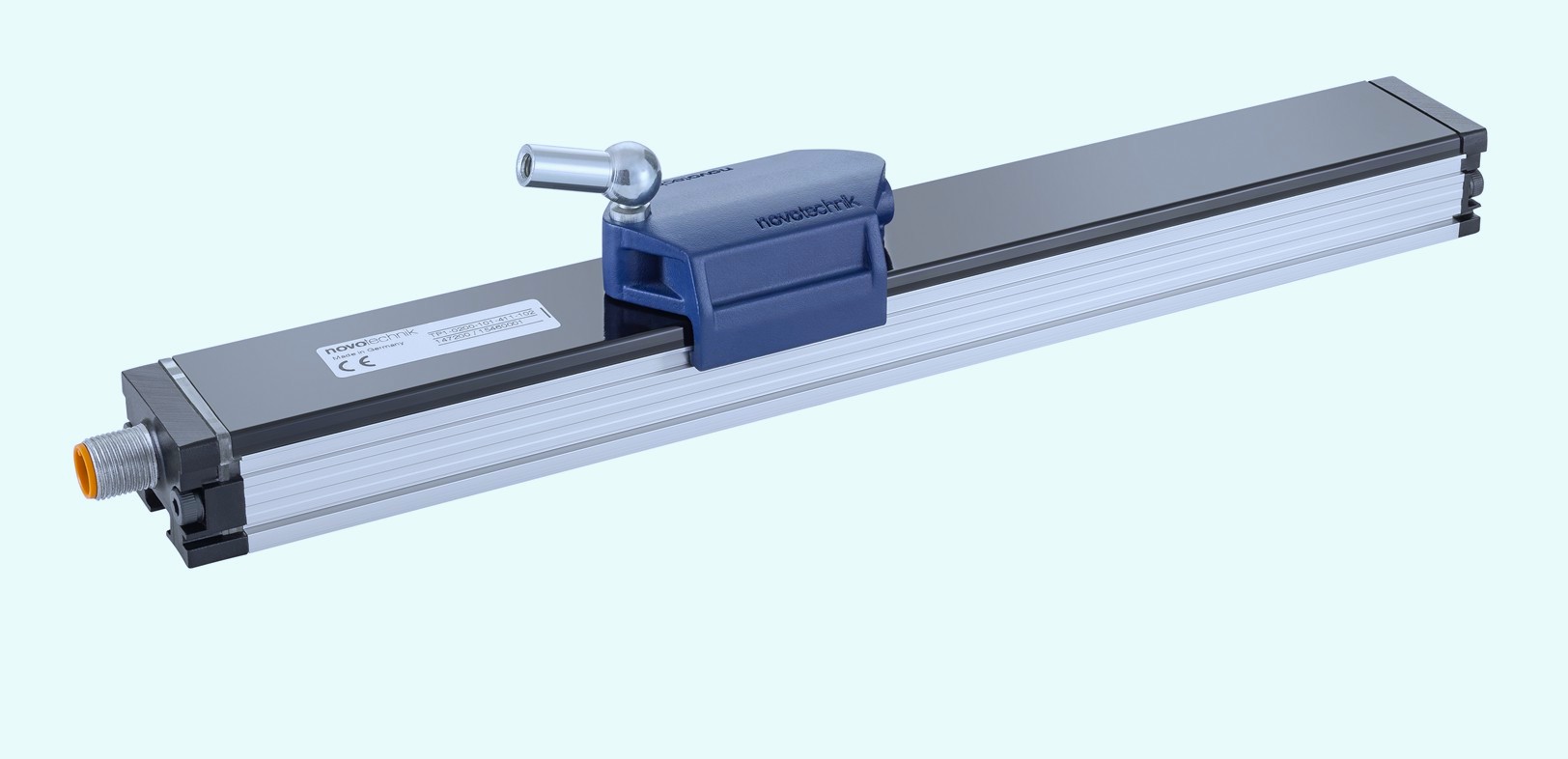
De TF1 is een lineaire positieopnemer met een inductief meetprincipe. Hij ideaal voor toepassingen…

Hoe kan men als organisatie overzicht over complexe productieprocessen houden, terwijl men tegelijk voldoet…