





Vier het 12-jarig jubileum van PCBWay en profiteer van exclusieve aanbiedingen
Vier in juli het 12-jarig jubileum van PCBWay met een evenement dat een hele…

De magneetgrijper van Goudsmit Magnetics, die onlangs vernieuwd is, dient voor het geautomatiseerd oppakken, neerzetten of positioneren van ijzeren, stalen of andere ferromagnetische voorwerpen (het oppakken van platen uit persen, bin picking, het assembleren van stalen onderdelen of het manipuleren van gestampte staaldelen, blanks en geperforeerde staalplaten) in robottoepassingen.
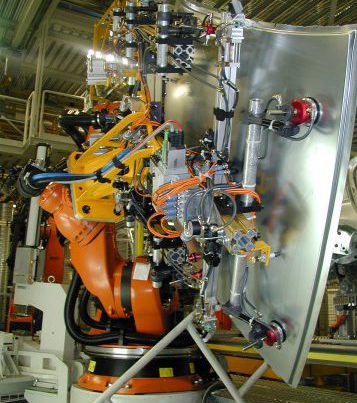
De ultralichte magneetgrijper is uitgerust met sterke permanente neodymium-magneten waardoor hij extra veilig is. Hij kan worden toegepast in grijpers aan robotarmen. De handlingmagneten kunnen met behulp van perslucht worden in- en uitgeschakeld en hebben een draadgat-interface voor bevestiging aan een robotarm. Dit maakt de magneetgrijpers een efficiënt alternatief voor traditionele robotgrijpers. Het systeem is onder meer geschikt voor het één voor één optillen en transporteren van zeer dunne staalplaten. De rubberen pad aan het uiteinde voorkomt verschuiven van het werkstuk tijdens verticaal oppakken, evenals beschadigingen van dit werkstuk. Het systeem kan eenvoudig worden aangesloten.


Vier in juli het 12-jarig jubileum van PCBWay met een evenement dat een hele…
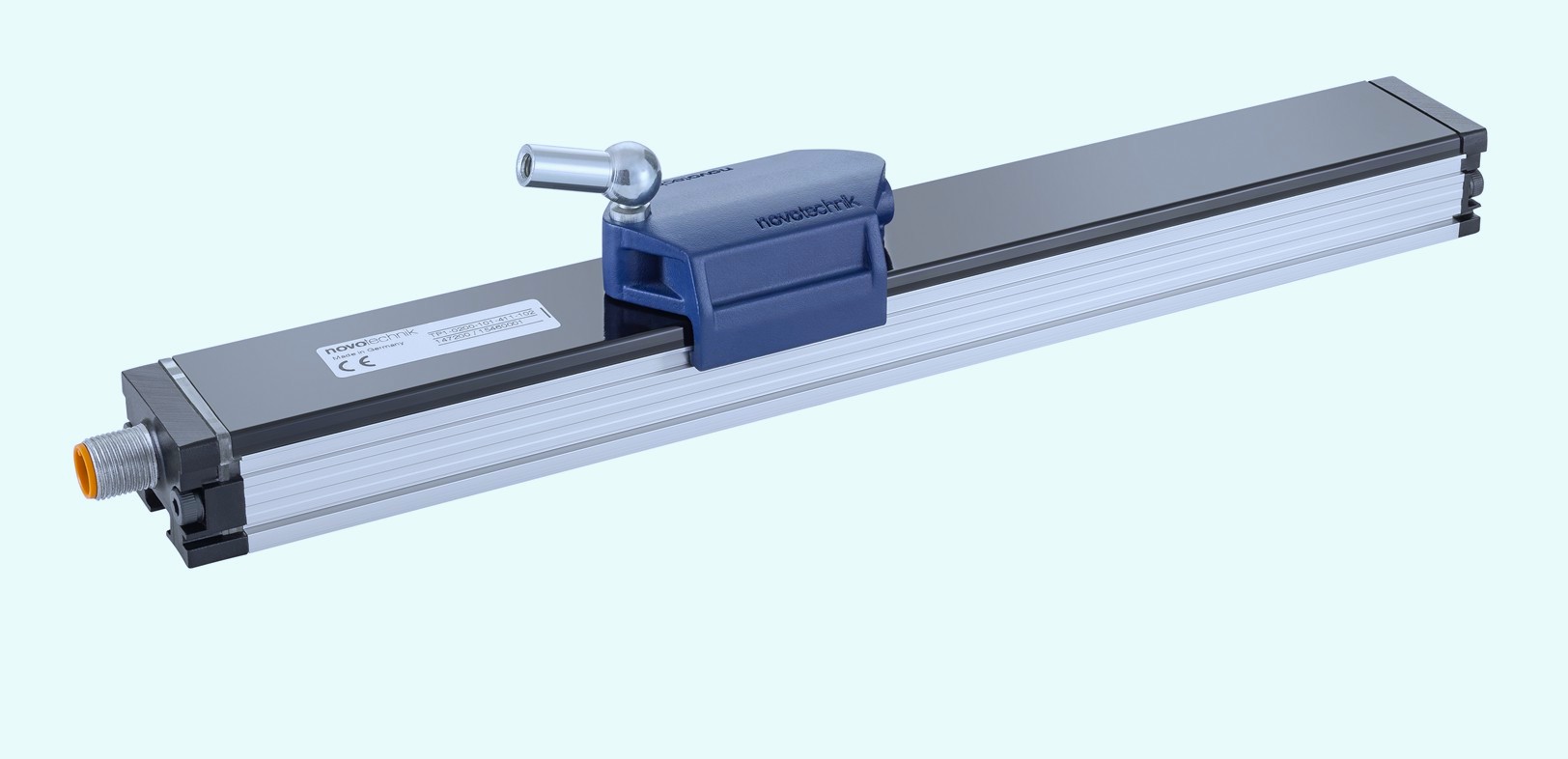
De TF1 is een lineaire positieopnemer met een inductief meetprincipe. Hij ideaal voor toepassingen…

Hoe kan men als organisatie overzicht over complexe productieprocessen houden, terwijl men tegelijk voldoet…