







Vier het 12-jarig jubileum van PCBWay en profiteer van exclusieve aanbiedingen
Vier in juli het 12-jarig jubileum van PCBWay met een evenement dat een hele…

De Co-Act JL1 grijper van Schunk is de eerste collaborative grijper die direct samenwerkt en communiceert met de mens. Zijn belangrijkste kenmerken zijn een meegevende buitenkant met afgeronde hoeken, een geïntegreerde bescherming tegen het verlies van werkstukken en een LED-paneel via welke de grijper met de operator communiceert.

Al in de basisstand voldoet de Co-act JL1 grijper aan de belangrijke eisen die aan een veilige samenwerking tussen mens en robot worden gesteld: hij verliest het vastgegrepen object nooit, hij herkent altijd het contact met de mens en hij brengt tijdens het grijpen nooit letsel toe. Als het proces in een noodsituatie wordt gestopt, wordt het vastgegrepen deel niet losgelaten. Met de omgevingssensoren houdt de grijper de omgeving continu in de gaten. Raakt de grijper de mens onbedoeld aan, dan wordt de grijperkracht automatisch begrensd. Met speciaal ontwikkelde grijpstrategieën en krachtmeetklauwen in de vingers reageert de Co-act JL1 grijper in realtime op situaties waarin het werkstuk of mogelijk een menselijke hand wordt gegrepen. Aan de basis staat de veiligheidsrichtlijn voor industriële robots DIN EN ISO 10218. Er wordt ook al voldaan aan toekomstige veiligheidseisen zoals vastgelegd in de norm DIN EN ISO 20218 (Veiligheidseisen aan industriële robots).


Vier in juli het 12-jarig jubileum van PCBWay met een evenement dat een hele…
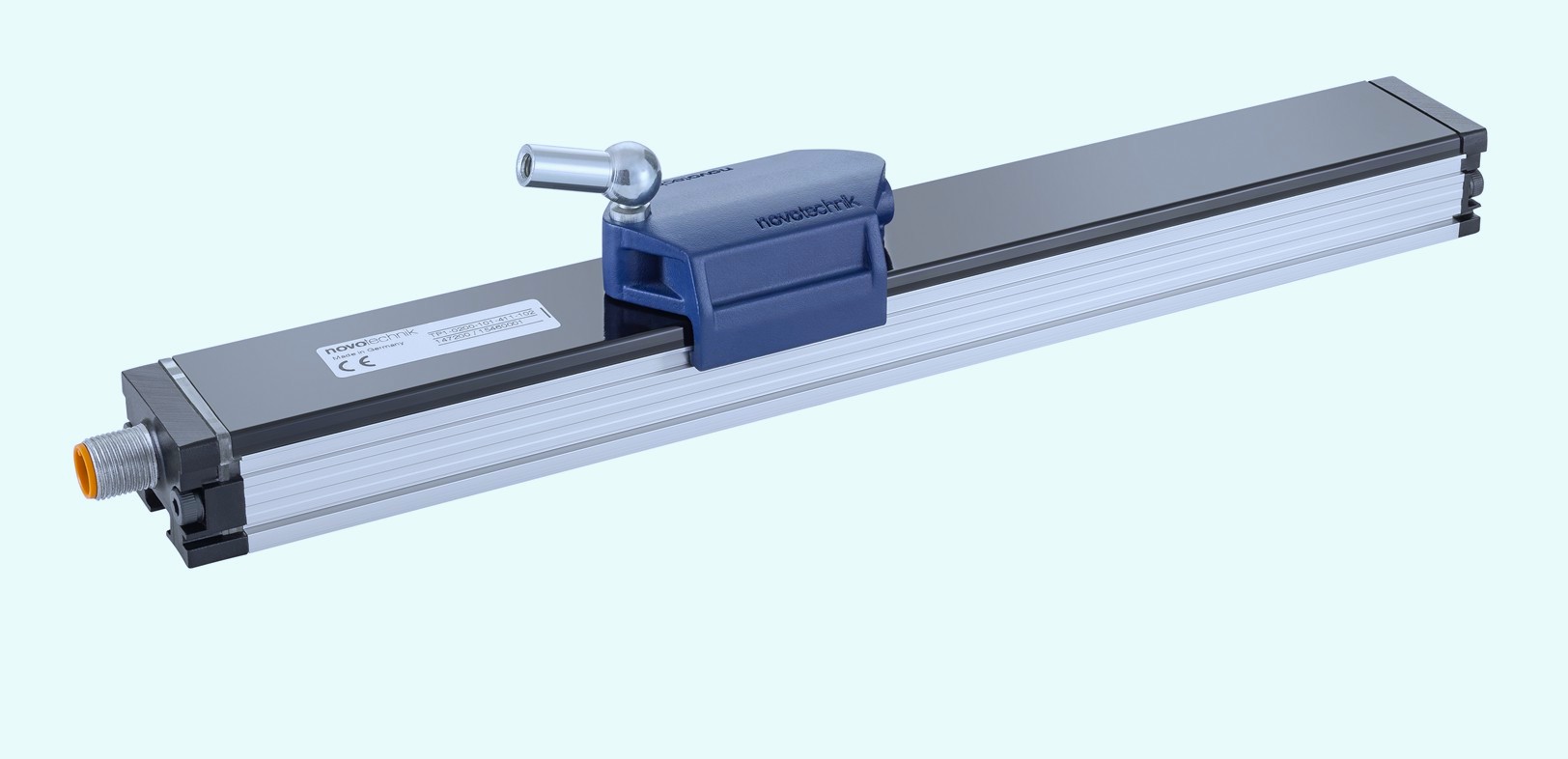
De TF1 is een lineaire positieopnemer met een inductief meetprincipe. Hij ideaal voor toepassingen…

Hoe kan men als organisatie overzicht over complexe productieprocessen houden, terwijl men tegelijk voldoet…