Onderzoek - ontwikkeling en innovatie
23 april 2026


Wiskunde laat robots samenwerken
Hoe laat je robots soepel samenwerken zonder dat ze elkaar in de weg zitten? Het antwoord ligt niet in zelflerende algoritmes, maar in wiskundige precisie. Als expert in mechatronica en niet-lineaire regeltechniek ontwikkelde RUG-hoogleraar Bayu Jayawardhanat formules die exact beschrijven hoe een systeem werkt—en hoe je het vervolgens optimaal aanstuurt.

Het probleem van de robotformatie. (Afbeeldingen Rijksuniversiteit Groningen)
Het probleem van de robotformatie.
Het probleem van de robotformatie.
Het probleem van de robotformatie.
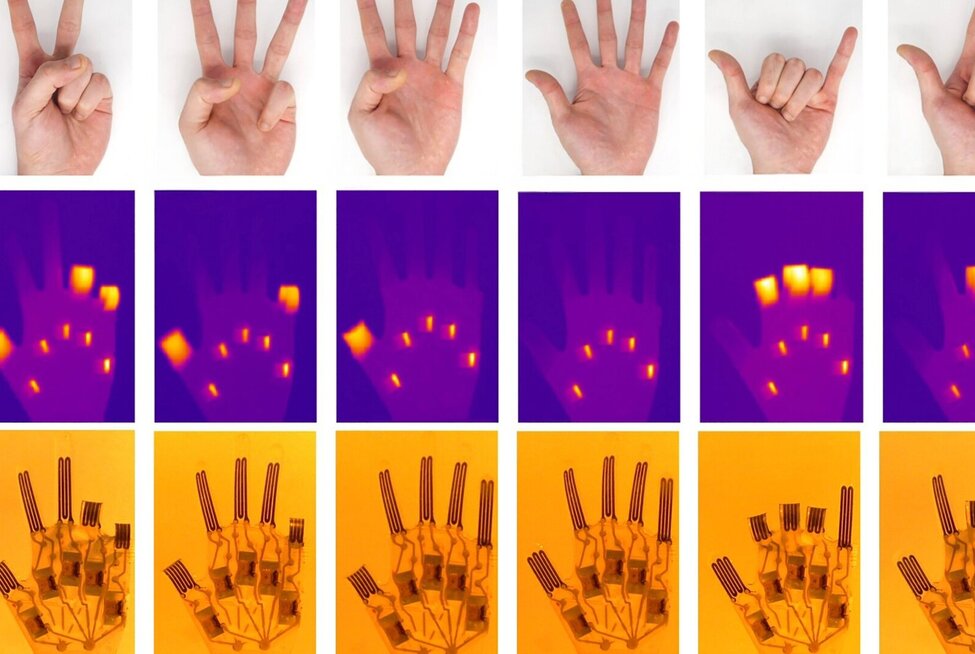
‘Ons vakgebied ligt dicht tegen kunstmatige intelligentie aan,’ legt Jayawardhana uit. ‘Maar waar AI vaak draait om leren uit data, beschrijven wij systemen tot in detail en bouwen we daar de benodigde wiskunde omheen.’ Die aanpak wordt onder meer toegepast in het FARMLAB-project, waarin verschillende landbouwrobots samenwerken om gewassen in real time te monitoren.
De basis van dit werk ligt in de systeem- en regeltechniek, een tak van de wiskunde die overal om ons heen te vinden is. Van de oude cd-spelers van Philips tot de uiterst precieze chipmachines van ASML: allemaal functioneren ze dankzij modellen die beweging en terugkoppeling exact beschrijven. Een systeem krijgt een input, produceert een output en past zich continu aan via feedback.
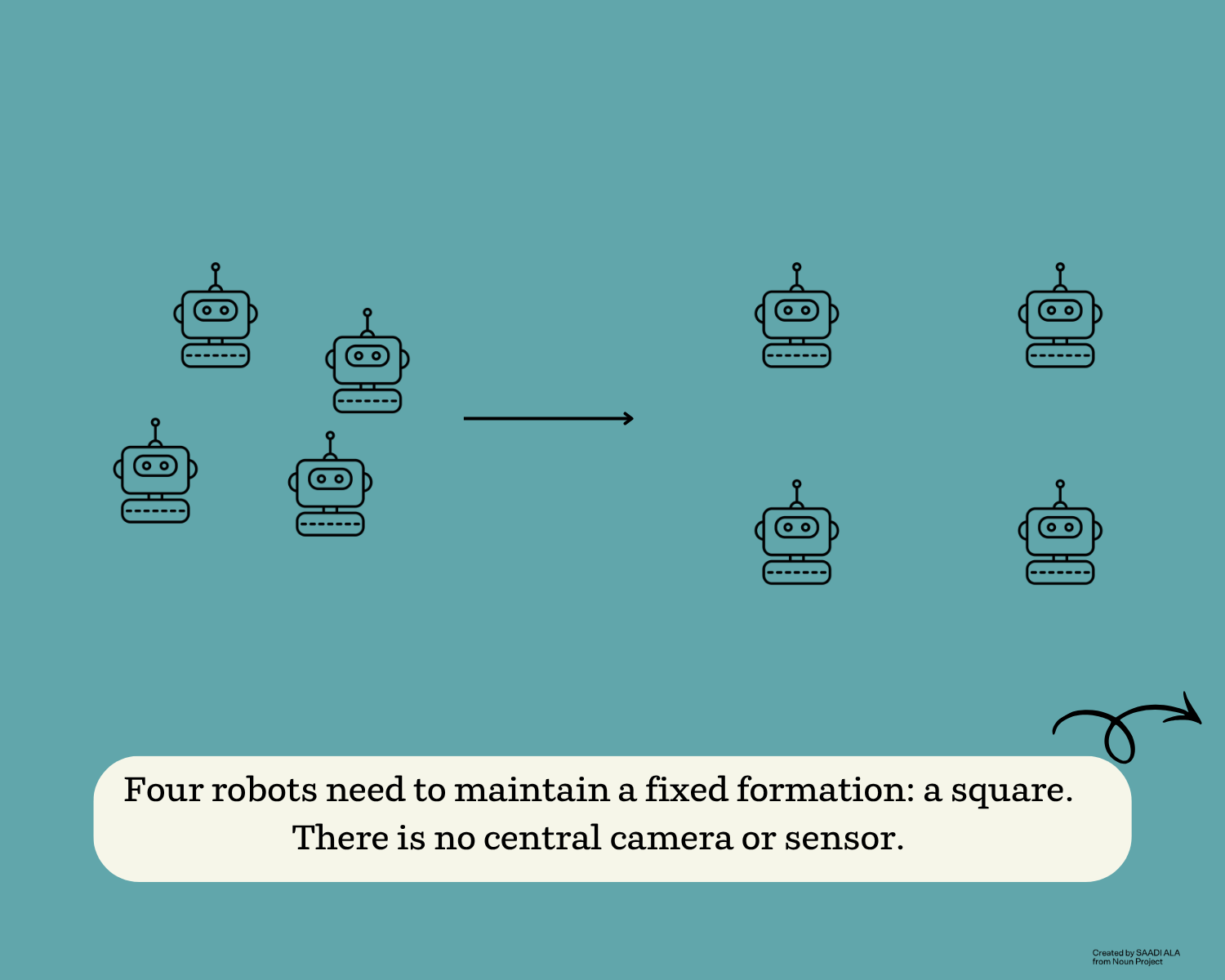
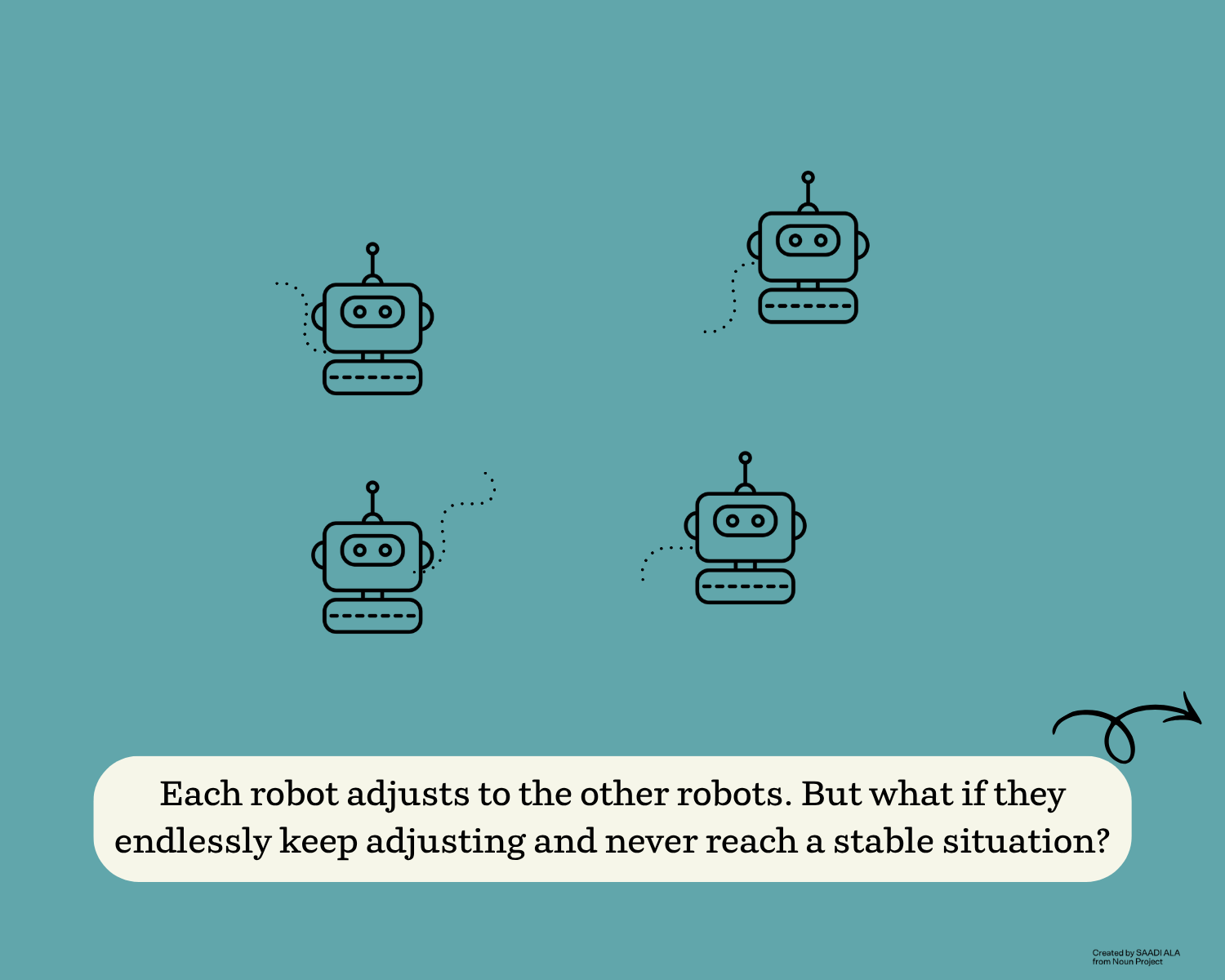
Dat principe geldt ook voor robots. Maar zodra meerdere robots moeten samenwerken, wordt het een stuk ingewikkelder. Stel je vier robots voor die in een vierkant moeten bewegen en onderling dezelfde afstand moeten houden. Zonder centrale coördinatie meten ze elk hun eigen positie ten opzichte van de anderen. Het risico? Een eindeloze correctielus, waarin elke aanpassing weer nieuwe reacties uitlokt—zonder ooit tot een stabiele formatie te komen.
‘Dat probleem hebben we zo’n tien jaar geleden opgelost, mits alle robots dezelfde sensoren gebruiken,’ zegt Jayawardhana. ‘We konden wiskundig bewijzen dat het systeem dan altijd stabiel wordt.’ De huidige uitdaging is groter: samenwerken met robots die verschillende soorten sensoren hebben en dus elk een ander beeld van de werkelijkheid krijgen.
Het probleem van de robotformatie
‘Stel, je koopt 4 verschillende robots bij de mediamarkt,’ vertelt Jayawardhana. ‘En je wil ze in een vaste formatie laten bewegen, of zelfs maar laten stilstaan. Bijvoorbeeld in een vierkante opstelling. En dat zonder centrale camera die alle robots van bovenaf waarneemt.’
Elke robot heeft dus zijn eigen waarneming en moet op basis daarvan zelf reageren op de anderen – een stukje naar voren, een stukje naar achteren, iets naar links… maar die andere reageren ook weer op hem (of haar). En dan kan het maar zo gebeuren dat ze nooit tot een stabiele situatie komen, bijvoorbeeld omdat ze door kleine meetfoutjes maar blijven corrigeren.
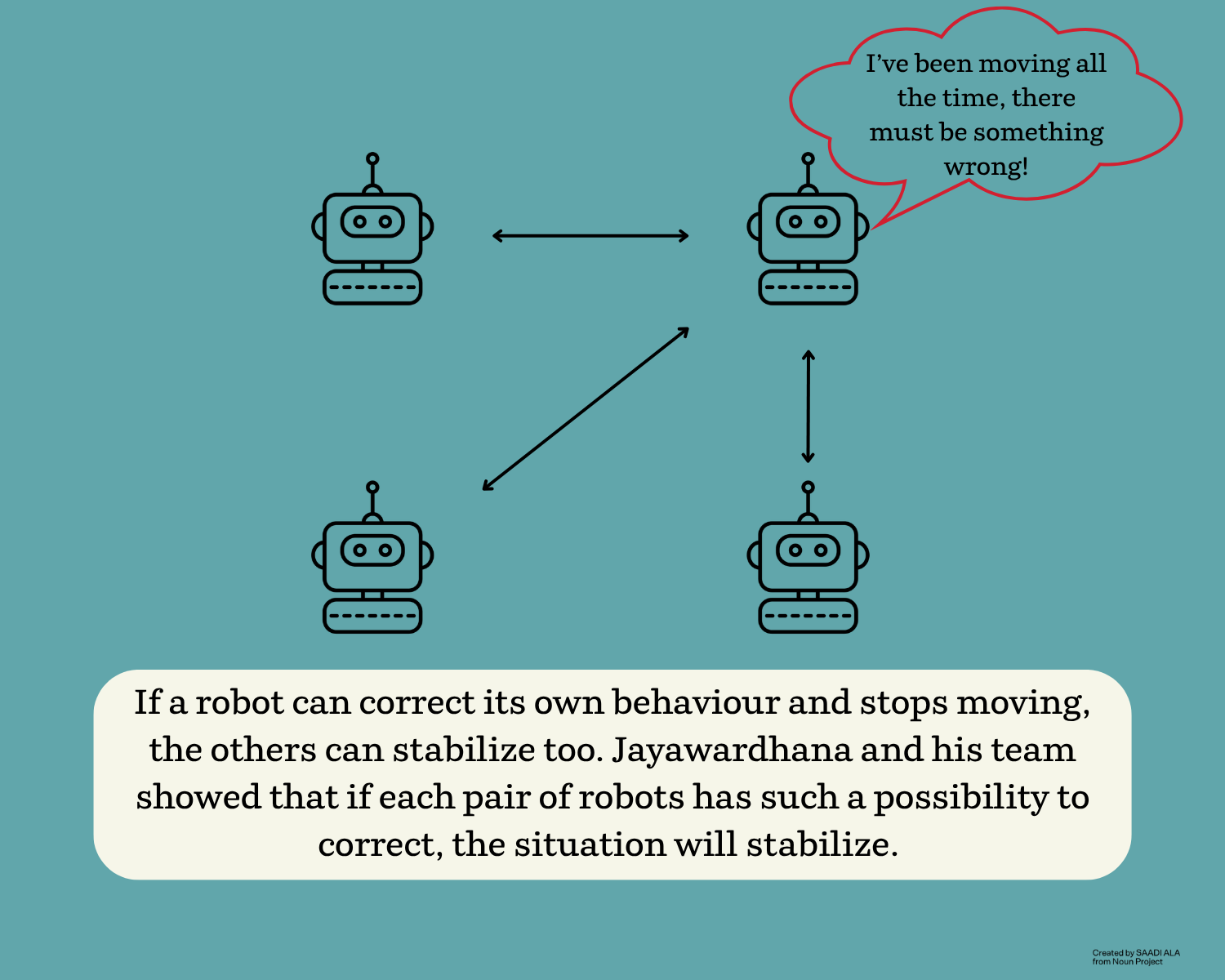
Tien jaar geleden losten Jayawardhana en zijn team het probleem op: met behulp van een zogenaamde estimator kan een robot zijn eigen gedrag corrigeren. Een robot die steeds minimale correcties blijft maken zal dan uiteindelijk stilstaan. ‘Dat is geen beslissing die zo’n robot neemt hoor,’ licht Jayawardhana toe. ‘Het is een ingeprogrammeerde actie.’ Jayawardhana bewees dat wanneer in elk paar van robots dat afstand tot elkaar moet houden er één met een estimator is, de situatie zal stabiliseren.
Precies daar richt FARMLAB zich op. In dit project werken onderzoekers aan een combinatie van grondrobots en drones die samen landbouwvelden analyseren. Door continu data te verzamelen over de gezondheid en groei van gewassen, kunnen boeren gerichter bemesten of bestrijdingsmiddelen inzetten.
Hoewel kunstmatige intelligentie een rol speelt—bijvoorbeeld in beeldherkenning om planten en onkruid te onderscheiden—ligt Jayawardhana’s focus elders. Hij ontwikkelt de wiskundige fundamenten die ervoor zorgen dat al die verschillende robots gecoördineerd bewegen en samenwerken.
Het opvallende aan zijn werk: grote experimenten of enorme datasets zijn niet nodig. ‘Eén simulatie is vaak al genoeg om te laten zien hoe het werkt,’ zegt hij. ‘Maar eigenlijk weten we dat al—gewoon op basis van de wiskunde.’
Meer nieuws over Onderzoek - ontwikkeling en innovatie