Bedrijven
5 december 2022

Sterren, sterrenstelsels en zwarte gaten in kaart brengen met motoren en systemen van FAULHABER
De komende vijf jaar zal SDSS V vier miljoen sterren en 300.000 zwarte gaten observeren, spectra en samenstellingen analyseren, ontwikkelingen in de geschiedenis van de kosmos reconstrueren en fysieke modellen van de geboorte van ons sterrenstelsel verifiëren.

SDSS V is een gigantisch internationaal project, met onder andere twee optische telescopen op het noordelijk en zuidelijk halfrond. En natuurlijk zijn ook die groot, met vezeloptica om het licht van
hemellichamen te registreren. En hiervoor wordt iets kleins ingezet: 500 robots met aandrijvingen van FAULHABER zorgen namelijk voor de extreem nauwkeurige uitlijning van de afzonderlijke vezels.
SDSS staat voor Sloan Digital Sky Survey, een samenwerkingsverband van astrofysici uit de hele wereld. Het afgelopen jaar hebben ze al een mijlpaal bereikt in de astronomie, met de grootste 3D-kaart van het universum. De onderzoekers werken continu aan uiteenlopende projecten, met behulp van talloze telescopen en andere wetenschappelijke instrumenten.
Het nieuwste project is SDSS V, waarmee weer een sprong moet worden gemaakt in ons begrip van de fysieke processen in de ruimte. Het doel is de ‘eerste spectroscopische observatie van de volledige hemel in verschillende astronomische dimensies van tijd in het optische en infrarode lichtspectrum’. In totaal willen de onderzoekers ruim zes miljoen objecten in het vizier nemen.
De telescopen van de beide observatoria bevatten optische vezels die gericht zijn op specifieke objecten in het universum. Zo kunnen individuele sterren of lichtgevende accretieschijven rondom zwarte gaten nauwkeurig worden geobserveerd en geanalyseerd. ‘Voorheen moesten we speciale platen maken voor alle verschillende observatietaken. Voor iedere plaat waren weken aan voorbereiding nodig. De vezels werden vervolgens met de hand in de plaat vastgezet. Dat was een ontzettend ingewikkeld en tijdrovend proces,’ vertelt Jean-Paul Kneib, Professor in de Astrofysica aan de Zwitserse École Polytechnique Fédérale de Lausanne.
Met de nieuwe technologie die speciaal voor SDSS V is ontwikkeld, duurt het geen weken meer om de vezels in een nieuwe positie te zetten – maar slechts één minuut. De vezels worden nu gericht door 500 kleine machines – de astronomen noemen ze “Astrorobots” – in iedere telescoop. Hierdoor kunnen de onderzoekers direct reageren op onverwachte gebeurtenissen in de kosmos.
Als andere telescopen bijvoorbeeld een supernova registreren, kan een van de optische elementen vrijwel zonder vertraging op de betreffende coördinaten gericht worden. Zo is een gedetailleerde analyse mogelijk van de fysiek-chemische processen binnen het tijdsverloop van een supernova-ontwikkeling, wat vroeger met dit soort instrumenten buiten bereik was.
Nauwkeurig tot op de micrometer
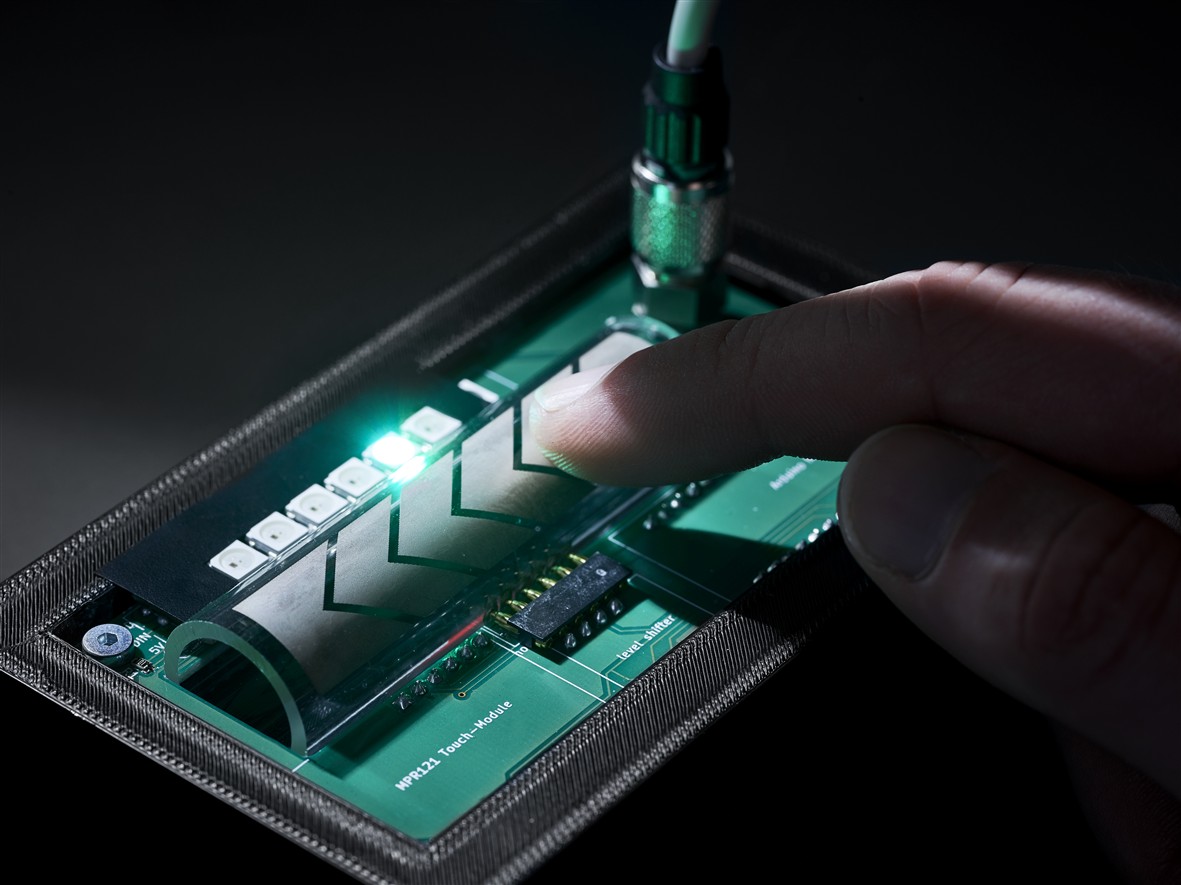
Iedere kleine Astrorobot bestaat uit twee slanke cilinders, die in de lengte zijn geplaatst met een gekromde extensie aan de voorzijde. De achterste cilinder is iets dikker en is vastgezet in de plaat van de telescoop. Hij fungeert als alfa-unit en draait de centrale as van de Astrorobot. De bèta-unit is excentrisch op de voorkant gemonteerd. Hij beweegt op een soortgelijke manier de vezeluiteinden in het gekromde uiteinde in een circulaire baan.
De combinatie van deze twee axiale bewegingen maakt het mogelijk om de vezeluiteinden vrij te positioneren in een cirkelvormig gebied. Iedere cirkel die een van de Astrorobots afdekt, overlapt gedeeltelijk met de cirkels van de naastgelegen units. Zo kan ieder punt in de hemel binnen het detectiebereik van de telescoop automatisch ‘in het vizier’ worden genomen.
De kleine Astrorobot bevat drie optische vezels. Eén vezel registreert licht in het zichtbare spectrum, de tweede is ontworpen voor infraroodlicht. De derde vezel is voor de kalibratie en ondersteunt de positionering van de vezeluiteinden in drie stappen. De nauwkeurigheid bedraagt enkele micrometers. In een eerste ruwe uitlijning draaien de twee robotmotoren totdat de vezel voor de observatie met een afwijking van gemiddeld 50 micrometer op het doelobject gericht is. In de telescoop bevindt zich een camera die op de voorste uiteinden is gericht. Deze detecteert het uiteinde van de kalibratievezel en meet de positie hiervan. Hierna wordt de kop van de robot in nog twee positioneringsstappen uitgericht met een afwijking van minder dan vijf micrometer.
Sneller onderzoeken
Jean-Paul Kneib: ‘De automatische uitlijning bespaart ons ontzettend veel tijd. Daarom kunnen we veel meer objecten observeren en hiervoor meer individuele metingen uitvoeren. De extreme nauwkeurigheid versterkt dit effect nog eens met een extra vermenigvuldigingsfactor. De optische vezels hebben een diameter van honderd micrometer. De diameter van het lichtpunt van een object in de kosmos dat de telescoop raakt, is net zo groot – of beter gezegd, klein. Hoe beter deze twee kleine oppervlakken met elkaar uitgelijnd zijn, des te meer licht hebben we tot onze beschikking voor onze metingen. En des te sneller behalen we valide uitkomsten.’
Deze extreme nauwkeurigheid stelt hoge technische voorwaarden. De motoren en tandwielkasten van FAULHABER voldoen hieraan. MPS (Micro Precision Systems), een Zwitserse dochteronderneming van FAULHABER, leverde bovendien de fijnmechanica, die speciaal voor deze toepassing werd ontwikkeld. De twee robotassen worden aangedreven door borstelloze DC-servomotoren uit de serie 1218 … B voor de alfaas en serie 0620 … B voor de bèta-as. De eerste twee cijfers in die typeaanduiding geven aan wat de diameter is van de microaandrijving: twaalf, respectievelijk zes millimeter. Hun kracht wordt via planetaire tandwielkasten overgedragen naar de robotmechanica. De robotmechanica die hier is toegepast, is ontwikkeld en gebouwd door MPS. Ingebouwde encoders geven de positie van de motoren door aan de controller.
Spelingsvrije nauwkeurigheid
Stefane Caseiro was bij MPS verantwoordelijk voor het ontwerp van de componenten. Hij legt uit: ‘Om de vereiste nauwkeurigheid te bereiken, mocht het systeem geen speling hebben.’ Daar slaagden de ontwikkelaars onder andere in door de conventionele koppeling tussen de tandwielassen en de mechanische assen van de robot te vervangen door klemverbindingen, en door een drukveer te installeren in de tandwielkast om zo de speling weg te nemen. ‘Alleen al het vinden van geschikte veren heeft ons maanden gekost,’ vertelt Caseiro.
Meer nieuws over Bedrijven